SMART FORWARD - Cooperative ITS Corridor
Het C-ITS corridor project heeft de derde fase van het project afgerond. De pilot operations. Over deze fase is een interesant boekje geschreven: Smart Forward. Via de link kan u dit boek lezen. Hierin wordt ingegaan op de verschillende test momenten van de afgelopen 7 jaar. Hierin wordt beschreven welke lessons-learned we hebben kunnen trekken (over 400 in totaal).
Directeur Wim Vossebelt heeft een quote mogen geven als partner in het gehele project.
Wat is jouw mening met betrekking tot de toekomstige ontwikkeling van in-car mogelijkheden?
Wim Vossebelt: Voor V-tron zijn de uitdagingen oneindig. De grootste uitdaging is echter om het Nederlandse wagenpark, bestaande uit nieuwere en oudere voertuigen, op een relatief gelijkwaardig niveau te houden. In onze visie zullen bestuurders nog steeds een belangrijke rol spelen, maar hoe gaan we die rol zo ondersteunen dat we fouten kunnen helpen voorkomen? Ook als het om oudere voertuigen gaat!
Naast het feit dat verkeersongevallen menselijk leed veroorzaken, is er een schadepost van veertien miljard euro per jaar. Een onaanvaardbare situatie! De grootste uitdaging is de ontwikkeling van waardevolle services die bestuurders kunnen begrijpen en gebruiken.
5G-BLUEPRINT
[ps2id id=’section-2′ target=”/]5G-Blueprint beoogt het ontwerpen en valideren van een technische architectuur, bedrijfs- en bestuursmodel voor ononderbroken grensoverschrijdend telebediend transport op basis van 5G-connectiviteit. 5G-Blueprint onderzoekt en definieert:
*De economie van 5G-tools in zowel grensoverschrijdend transport & logistiek als personenvervoer: CAPEX (kapitaaluitgaven) en OPEX (operationele uitgaven) in beeld brengen, zowel aan de aanbod- (telecom) als aan de vraagzijde (transport & logistiek) voor transformatie van huidige zakelijke praktijken en nieuwe waardeproposities
*De Overheids-vraagstukken en -oplossingen met betrekking tot verantwoordelijkheden en aansprakelijkheid binnen de waardeketen die afhankelijk zijn van grensoverschrijdende connectiviteit en naadloze diensten met betrekking tot het Nederlandse en Belgische regelgevingskader (telecommunicatie, verkeer en CAM (Connected and Automated Mobility) experimentenwetten, contracten, waardeketenbeheer )
*Tactische en operationele (pre-) voorwaarden die aanwezig moeten zijn om de volledige waarde van 5G-tooled transport & logistiek te krijgen. Dit omvat het implementeren van use cases die het coöperatieve bewustzijn vergroten om veilig en verantwoord teleopereerd vervoer te garanderen
*Voorbereiden en besturen van telegestuurd en telebewaakt transport over wegen en waterwegen om het toenemende tekort aan mankracht te verlichten en transport en logistiek op een hoger niveau van efficiëntie te brengen door het delen van gegevens in de toeleveringsketen en het gebruik van AI.
*Onderzoek naar de mogelijkheden om het volume van ’s nachts vervoerde vracht te vergroten wanneer er een overvloed aan fysieke infrastructuurcapaciteit is; de verlaging van de personeelskosten zou dit op kosteneffectieve basis mogelijk maken
Telebediening wordt mogelijk gemaakt door de volgende 5G-kwaliteiten, zoals lage latentie, betrouwbare connectiviteit en hoge bandbreedte.
Het resultaat van het project zal de blauwdruk zijn voor operationele pan-Europese inzet van tele-opererende transportoplossingen in de logistieke sector en daarbuiten.
")
")
CONCORDA
[ps2id id=’section-3′ target=”/]CONCORDA draagt bij aan de voorbereiding van Europese snelwegen voor geautomatiseerd rijden en het platoonen van vrachtwagens met hoge dichtheid met adequate verbonden diensten en technologieën.
CONCORDA, gelanceerd in oktober 2017 en gefinancierd door de Connecting Europe Facility, heeft gewerkt aan het leveren van adequate geconnecteerde diensten en technologieën op het gebied van interferenties en interoperabiliteit om versnippering tegen te gaan en achterwaartse interoperabiliteit tussen Cooperative-ITS-services en de door C-ROADS geharmoniseerde services te waarborgen. onder echte verkeerssituaties.
Technologieën
CONCORDA combineert 802.11p- en LTE-V2X-connectiviteit zonder de bestaande services te beïnvloeden op het gebied van interferenties en interoperabiliteit om achterwaartse C-ITS-service-interoperabiliteit te garanderen met de services die door C-ROADS zijn geharmoniseerd onder echte verkeerssituaties.
Interoperabiliteit & Testen
CONCORDA heeft tests uitgevoerd op locaties in Nederland, België, Frankrijk, Duitsland en Spanje, met als doel de interoperabiliteit van de testlocaties te verbeteren. De interoperabiliteit is ontwikkeld langs drie lijnen:
3 testlocaties in Nederland:
A. Testlocatie Metropool Amsterdam
B. Testlocatie Noord-Brabant
C. Helmond Metropolitan Area
Gefocust op:
Hybride communicatie (pre) implementatie en wegkantnetwerken voor geautomatiseerd rijden Use cases. Publieke rol met betrekking tot geautomatiseerd rijden en veiligheid. Wegensystemen (RSU en communicatienetwerken). Integratie van communicatie en functionaliteit in auto’s (FRC).


REVEAL
[ps2id id=’section-4′ target=”/]
Het doel van ReVeAL is om Urban Vehicle Access Regulations (UVAR) toe te voegen aan het standaardbereik van stedelijke mobiliteitsovergangen van steden in heel Europa. Het door de EU gefinancierde R&I ReVeAL-project kijkt voor het eerst sinds het CURACAO-project (tien jaar geleden aflopend) naar dit hot topic.
De overkoepelende missie van het project is om steden in staat te stellen de stedelijke ruimte en het gebruik van het vervoersnetwerk te optimaliseren door nieuwe en geïntegreerde pakketten van beleid en technologieën voor de toegang tot stedelijke voertuigen. Dergelijk beleid kan leiden tot minder uitstoot, minder lawaai en een betere bereikbaarheid en levenskwaliteit, wat vooral de mensen in deze steden ten goede komt. Dit beleid kan ook duurzamere vervoerskeuzes stimuleren, waardoor steden leefbaarder, uiteindelijk gezonder en aantrekkelijker worden voor elk lid van de samenleving.
Daartoe combineert ReVeAL conceptueel werk en case study onderzoek met praktische UVAR-implementatie in zes pilootsteden, evenals systematische interactie met belanghebbenden door professionele communicatie-activiteiten.
Het project is gestart in juni 2019 en heeft een looptijd van drie jaar.
VISTA
[ps2id id=’section-5′ target=”/]
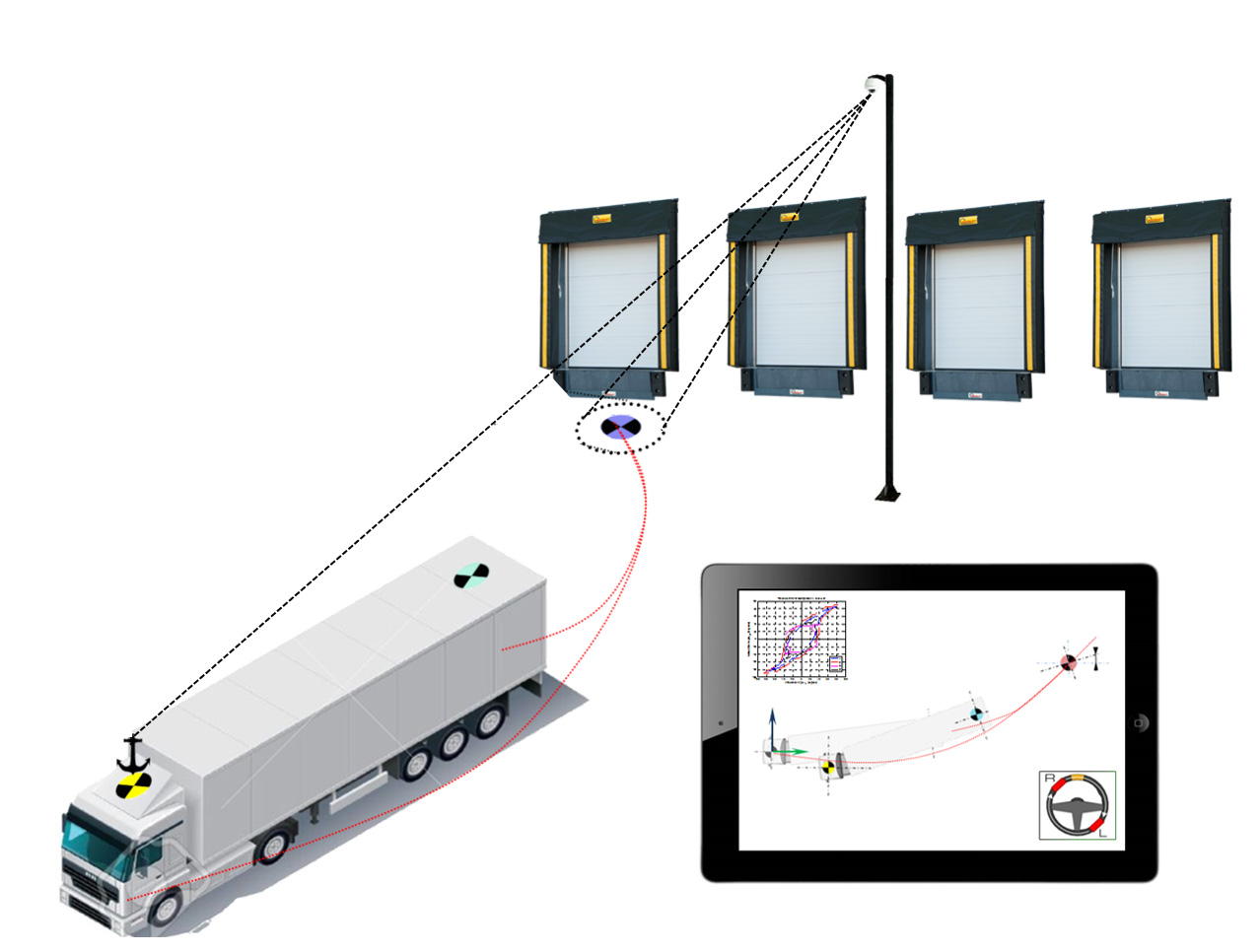
Achterwaarts manoeuvreren van truck-trailer combinaties kan uitdagend zijn, zeker als het een voertuig met meerdere geledingen betreft. Logistieke bedrijven hebben te maken met aanzienlijke schade, veroorzaakt door voertuigcombinaties die bezig zijn met ‘aandokken’: het achterwaarts parkeren van het voertuig tegen een dokdeur om goederen te laden en lossen.
VISTA staat voor VIsion Supported Truck docking Assistant. Doel van VISTA is om truckchauffeurs te ondersteunen tijdens het manoeuvreren van voertuigcombinaties naar dokdeuren op logistieke terreinen. Het hart van de VISTA oplossing is een nauwkeurige, optische lokalisatie van truck en trailers. Hiervoor worden camera’s gemonteerd op het distributiecentrum. Gebaseerd op deze lokalisatie wordt een optimaal, haalbaar pad berekend. De chauffeur krijgt vervolgens via een intuïtieve gebruikersinterface informatie om dit pad goed te kunnen volgen. The chauffeur krijgt de gebruikersinterface overhandigd bij binnenkomst op het distributiecentrum.
I-CAVE
[ps2id id=’section-6′ target=”/]Dit onderzoeksprogramma gaat de huidige transportuitdagingen aan met betrekking tot doorvoer en veiligheid met een geïntegreerde benadering van geautomatiseerd en coöperatief rijden.
In i-CAVE is een Cooperative Dual Mode Automated Transport
(C-DMAT) -systeem onderzocht en ontworpen, bestaande uit
dual-mode voertuigen die automatisch en handmatig kunnen worden bestuurd voor maximale flexibiliteit. Het programma integreert technologische routekaarten voor geautomatiseerd en coöperatief rijden, waardoor de ontwikkeling van nieuwe transportsystemen wordt versneld die aan de huidige en toekomstige mobiliteitseisen voldoen. Naast deze activerende technologieën wordt de nadruk gelegd op fouttolerantie en faalveiligheid, draadloze communicatie, menselijke factoren en anderen die de overgang van controle tussen handmatig en geautomatiseerd rijden en de reactie van andere weggebruikers aanpakken.
i-CAVE pakt de belangrijkste uitdagingen van geautomatiseerd rijden aan, d.w.z. het bereiken van hoge veiligheid en betrouwbaarheid door een strikt technologisch ontwerp, gecombineerd met naadloze integratie tussen geautomatiseerd en handmatig rijden om maximale flexibiliteit en gebruikersacceptatie te verkrijgen. Een living-lab zal worden gebruikt voor de integratie en evaluatie van nauwkeurige vision-gebaseerde mapping- en lokalisatietechnieken, gedistribueerde coöperatieve voertuigbesturingsalgoritmen en fleetmanagement methoden.


INTERCOR PROJECT - KIJKJE ACHTER DE SCHERMEN
[ps2id id=’section-6′ target=”/]V-tron is samen met haar partners al sinds 2017 betrokken bij het Europese Intercor project. Samen met Rijkswaterstaat bereizen wij de vier deelnemende landen en de bijbehorende projectpartners. Vanuit Rijkswaterstaat is hier een mooie tweedelige overzichtsvideo van gemaakt. De ontwikkeling van de dienst wordt hier goed in weergegeven. Alleen bereik je niks, de kracht van samenwerken wordt in dit project nogmaals bevestigd.
Test Fest 1: Dordrecht – NL – juli 2017
TestFest 2: Reims – FR – april 2018
TestFest 3: Kent – UK – oktober 2018
TestFest 4: Antwerpen – BE – maart 2019
PRE TEST-FEST GLOSA HELMOND
[ps2id id=’section-7′ target=”/]Op 13 en 14 juni vond het GLOSA PRE-TESTFEST plaats in Helmond. Deze Testfest is het derde Testfest in een serie van 5 Testfesten die het inernationale Intercor project uitvoert. Het Intercor project (NL, UK, FR, BE) wordt gecoördineerd door Rijkswaterstaat en richt zich op de uitrol van C-ITS diensten in Europa die interoperabel zijn over de landsgrenzen heen. Het PRE-TESTFEST is georganiseerd door Provincie Noord-Brabant en gemeente Helmond in samenwerking met de UK partners. Tijdens deze twee dagen zijn de Intercor standaarden voor C-ITS GLOSA (Groen Licht Optimaal SnelheidsAdvies) getest door verschillende aanbieders uit binnen-en buitenland
V-tron heeft in samenwerking met het ITS-corridor team een eigen ZOOF varriant gemaakt om GLOSA diensten te ondersteunen. Tijdens deze tweedaagse heeft V-tron meerdere demonstraties gegeven om een impressie te geven aan het aanwezige publiek. meer informatie?
Intercor (EN) of Smart Wayz (NL)
TALKING MAPS
[ps2id id=’section-8′ target=”/]De auto’s van de weginspecteurs van de provincie Noord-Brabant gaan data verzamelen voor digitale kaarten. Onder de noemer Talking Maps scannen de auto’s de 560 kilometer provinciale weg. De proef moet uitwijzen of inspectievoertuigen inderdaad als sensor kunnen dienen, of ze voldoende data verzamelen voor een goede kaart en of die kaart ook kan helpen bij het efficiënt beheren van de wegen. Deze high definition (HD) kaarten, die zeer gedetailleerd kenmerken van de weg weergeven, zijn bovendien belangrijk voor zelfrijdende auto’s.
Talking Maps is een proef van de samenwerkende provincie Noord-Brabant, het Ministerie van Infrastructuur en Waterstaat en de bedrijven V-TRON en AND en zal maximaal twee jaar duren. De betrokken organisaties tekenden een samenwerkingsovereenkomst op 20 maart op Intertraffic in de RAI in Amsterdam.
Volgens Ruben Kragten, vertegenwoordiger in de samenwerking vanuit V-TRON, is de overeenkomst een mooi voorbeeld van een samenwerking tussen marktpartijen en overheden. “We willen onze technische oplossingen testen en toepassen in het verkeer. En dat kunnen we niet alleen. Daar werken we graag voor samen met de overheid”, zegt hij.
ZOOF A16
[ps2id id=’section-9′ target=”/]Rijkswaterstaat werkt dagelijks aan een bereikbaar Nederland. Dat doen zij niet alleen door aanleg van nieuwe wegen en vaarwegen, maar ook door efficiënter gebruik van bestaande infrastructuur. Innovatieve systemen voor reisinformatie en verkeersmanagement kunnen hen daarbij helpen. Momenteel werkt RWS in afstemming met Duitsland en Oostenrijk aan de invoering van een aantal coöperatieve ITS-diensten op een zogenaamde ‘corridor’, het tracé dat loopt van Rotterdam, via Breda, Tilburg en Eindhoven naar Venlo
(A16 – A58 – A2 – A67).
V-tron is ingestapt als HMI (Human Interface) leverancier en heeft voor dit project de ZOOF app ontwikkeld. Wij verzorgen de interface richting de bestuurder. Zijn er meldingen weer te geven vanuit de wegkant (A16 – A58 – A67) dan wordt dit in de ZOOF app getoond aan de bestuurder en kan hij zijn rijgedrag hier op aanpassen.
Meer informatie over dit project is te vinden op de site van de ITS Corridor.
PRAKTIJKPROEF A58
[ps2id id=’section-10′ target=”/]Is sensordata uit voertuigen in de toekomst technisch goed bruikbaar voor verkeersmanagement of andere diensten? Dat is de vraag die centraal stond tijdens een test met de dienst Probe Vehicle Data, in opdracht van het projectteam C-ITS Corridor van Rijkswaterstaat. Lees hier het volledige artikel.
Tijdens bovengenoemde test – die gecoördineerd werd vanuit de Innovatiecentrale in Helmond – verstuurden de On Board Units (OBU) van passerende testvoertuigen berichten met informatie over het voertuig, zoals de positie en snelheid. De berichten werden opgevangen door de beveiligde ETSI G5 wifi-verbinding. Daarnaast werden ook via het mobiele 3G/4G netwerk berichten verzameld uit de testvoertuigen. Hiervoor is de ZOOF-app van het project Spookfiles A58 gebruikt. De eerste bevindingen zijn positief. Via een webviewer waren de exacte locaties en afgelegde routes van de testvoertuigen te zien.
ZOOF A58
[ps2id id=’section-11′ target=”/]ZOOF is een app voor iPhone en Android-telefoons die u als weggebruiker adviseert over de optimale rijsnelheid, over handelen bij in- en uitvoegstroken en over de volgafstand na files. Met ZOOF scoort u punten (ZOOFies) door deze adviezen op te volgen, die u kunt inwisselen voor leuke beloningen bij de partners van ZOOF. Momenteel is ZOOF te gebruiken op de A67 en A58, waardoor u van Tilburg naar Eindhoven en Venlo kunt rijden met ZOOF.
ZOOF is een product dat voortkomt uit een samenwerking tussen de regionale overheidsinstantie BBZOB (Beter Benutten Zuid-Oost Brabant), SRE (Samenwerkingsverband Regio Eindhoven), de Provincie Noord-Brabant en het bedrijfsleven. Samen gaan overheid en bedrijfsleven voor een betere doorstroom op de Nederlandse snelwegen. Binnen de projecten Brabant InCar III en Spookfiles A58 voert ZOOF in opdracht van de overheid proeven uit op de A67 en A58 die zich richten op het verbeteren van de doorstroming.
U kunt deelnemen aan deze proeven! ZOOF is te downloaden via de Google Play Store en Apple AppStore. Registreer u via de app, start de route en scoor ZOOFies!
Meer informatie over dit project is te vinden op de site van ZOOF.