SMART FORWARD - Cooperative ITS Corridor
The C-ITS corridor project has completed the third phase of the project. The pilot operations. An interesting booklet has been written about this phase: Smart Forward. You can read this book via the link. It looks at the different test moments of the past 7 years. It describes the lessons-learned (over 400 in total).
Director Wim Vossebelt was allowed to give a quote as a partner in the whole project.
What is your take on the future development of in-car capabilities?
Wim Vossebelt: “For V-tron, the challenges are endless. However, the biggest challenge is to keep the Dutch fleet, consisting of newer and older vehicles, at a relatively equivalent level. In our vision, drivers will still play an important role, but how will we support that role in such a way that we can help prevent errors? Even when older vehicles are involved!“
Apart from the fact that road accidents cause human suffering, there is a loss of 14 billion euros a year. An unacceptable situation! The biggest challenge is to develop valuable services that drivers can understand and use.
5G-BLUEPRINT
[ps2id id=’section-2′ target=”/]
5G-Blueprint aims to design and validate a technical architecture, business and governance model for uninterrupted cross-border teleoperated transport based on 5G connectivity. 5G-Blueprint explores and defines:
*The economics of 5G tools in both cross-border transport & logistics and passenger transport: capturing CAPEX (capital expenditure) and OPEX (operational expenditure) on both the supply (telecoms) and demand (transport & logistics) sides for transformation of current business practices and new value propositions
*Government issues and solutions regarding responsibilities and liability within the value chain dependent on cross-border connectivity and seamless services with regard to the Dutch and Belgian regulatory framework (telecommunications, traffic and CAM (Connected and Automated Mobility) experiment laws, contracts, value chain management )
*Tactical and operational (pre-) conditions that need to be in place to get the full value of 5G-tooled transport & logistics. This includes implementing use cases that increase cooperative awareness to ensure safe and responsible teleoperated transport
*Preparing and piloting tele-operated and tele-monitored transport on roads and waterways to alleviate the growing manpower shortage and bring transport and logistics to a higher level of efficiency by sharing data in the supply chain and using AI
*Examine the possibilities of increasing the volume of freight transported at night when there is an abundance of physical infrastructure capacity; the reduction in manpower costs would enable this on a cost-effective basis
Teleoperation will be enabled by the following 5G qualities, such as low latency, reliable connectivity and high bandwidth.
The result of the project will be the blueprint for operational pan-European deployment of tele-operated transport solutions in the logistics sector and beyond.
")
")
CONCORDA
CONCORDA contributes to the preparation of European highways for automated driving and the platooning of high-density trucks with adequate connected services and technologies.
Launched in October 2017 and funded by the Connecting Europe Facility, CONCORDA has worked to deliver adequate connected interference and interoperability services and technologies to combat fragmentation and backward interoperability between Cooperative-ITS services and the C -Roads to ensure harmonized services. under real traffic situations.
Technologies
CONCORDA combines 802.11p and LTE-V2X connectivity without affecting existing interference and interoperability services to ensure backward C-ITS service interoperability with services harmonized by C-ROADS under real traffic situations.
Interoperability & Testing
CONCORDA has conducted tests at locations in the Netherlands, Belgium, France, Germany and Spain, with the aim of improving the interoperability of the test locations. Interoperability has been developed along three lines:
3 test locations in the Netherlands:
A. Test location Amsterdam Metropolitan Area
B. Test location North Brabant
C. Helmond Metropolitan Area
Focused on:
Hybrid communication (pre) implementation and roadside networks for automated driving. Use cases. Public role regarding automated driving and safety. Road systems (RSU and communication networks). Integration of communication and functionality in cars (FRC).


REVEAL
The goal of ReVeAL is to add Urban Vehicle Access Regulations (UVAR) to the standard range of urban mobility transitions of cities across Europe. The EU-funded R&I ReVeAL project looks at this hot topic for the first time since the CURACAO project (ending ten years ago).
The overarching mission of the project is to enable cities to optimize urban space and the use of the transport network through new and integrated packages of policies and technologies for access to urban vehicles. Such policies can lead to less emissions, less noise and better accessibility and quality of life, which will mainly benefit the people in these cities. This policy can also encourage more sustainable transport choices, making cities more livable, ultimately healthier and more attractive to every member of society.
To this end, ReVeAL combines conceptual work and case study research with practical UVAR implementation in six pilot cities, as well as systematic interaction with stakeholders through professional communication activities.
The project started in June 2019 and will run for three years.
VISTA
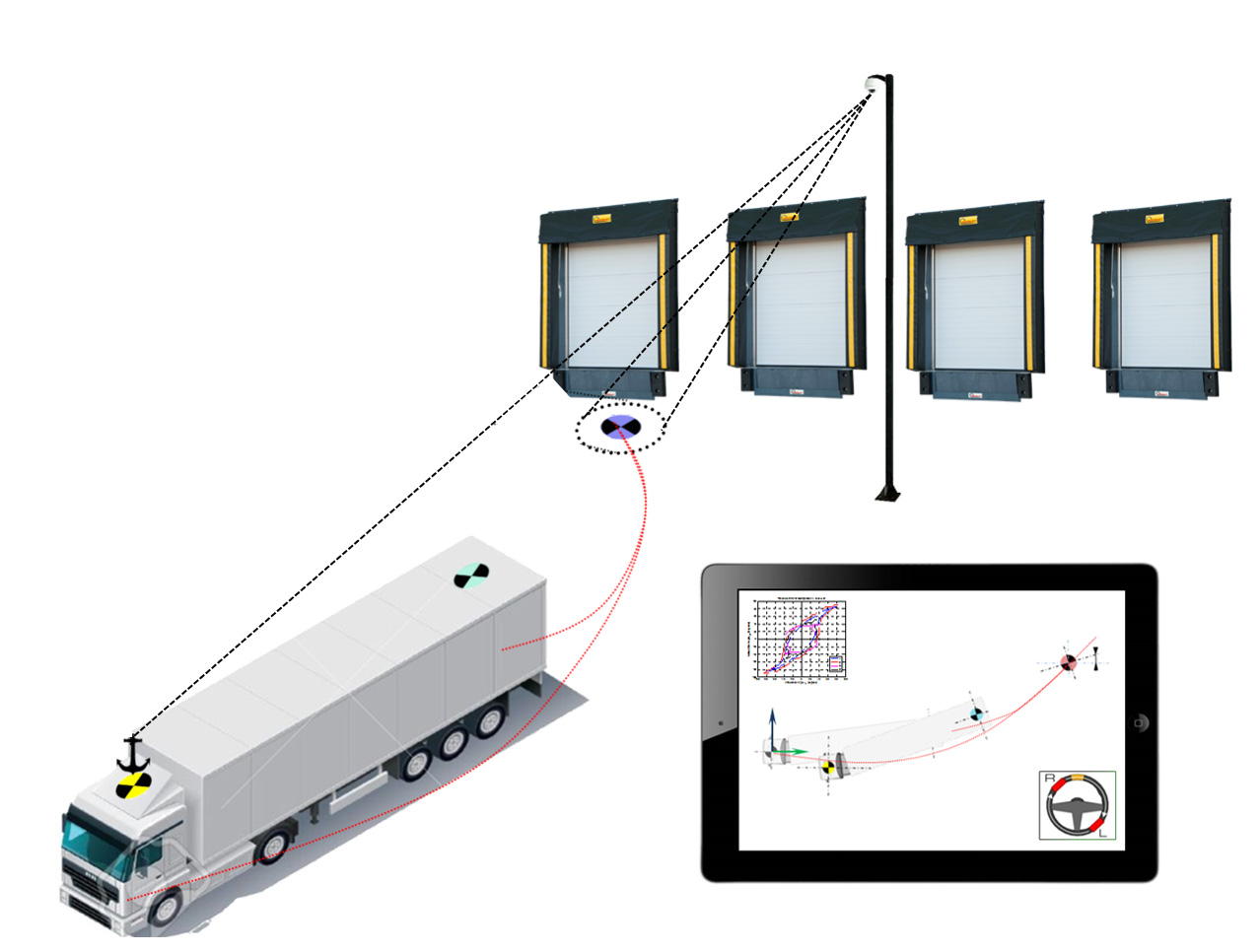
Maneuvering backwards from truck-trailer combinations can be challenging, especially if it is a multi-articulated vehicle. Logistics companies face significant damage caused by vehicle combinations engaged in ‘docking’: parking the vehicle backwards against a dock door to load and unload goods.
VISTA stands for VIsion Supported Truck docking Assistant. The aim of VISTA is to support truck drivers during the maneuvering of vehicle combinations to dock doors in logistics areas. The heart of the VISTA solution is an accurate, optical localization of truck and trailers. For this, cameras are mounted at the distribution center. Based on this localization, an optimal, achievable path is calculated. The driver then receives information via an intuitive user interface to follow this path properly. The driver is presented with the user interface upon entering the distribution center.
I-CAVE
[ps2id id=’section-4′ target=”/]
This research program addresses current transportation challenges regarding throughput and safety with an integrated approach to automated and cooperative driving. In i-CAVE a Cooperative Dual Mode Automated Transport (C-DMAT) system is researched and designed, consisting of dual mode vehicles which can be driven automatically and manually to allow maximum flexibility.
The program integrates technological road maps for automated and cooperative driving, accelerating the development of novel transportation systems addressing today’s and future mobility demands. Besides these enabling technologies, focus is put on fault tolerance and fail safety, wireless communications, human factors and others addressing transition of control between manual and automated driving and response of other road users.
i-CAVE tackles the main challenges of automated driving, i.e., achieving high levels of safety and reliability through rigorous technological design, combined with seamless integration between automated and manual driving to obtain maximum flexibility and user acceptance. A living-lab will be used for the integration and evaluation of accurate vision-based mapping and localization techniques, distributed cooperative vehicle control algorithms and fleet management methods.
In addition it allows for a close-to-market transport system, which can be commercialized by the transport industry, specifically leading automotive tiers in the Netherlands, by applying the results in their road maps.


INTERCOR PROJECT - BEHIND THE SCENES
V-tron, together with its partners, has been involved in the European Intercor project since 2017. Together with Rijkswaterstaat we travel the four participating countries and the associated project partners. From Rijkswaterstaat a beautiful two-part overview video has been made. The development of the service is well represented in this. Only you achieve nothing, the power of collaboration is confirmed once again in this project.
Test Fest 1: Dordrecht – NL – July 2017
TestFest 2: Reims – FR – April 2018
TestFest 3: Kent – UK – October 2018
TestFest 4: Antwerp – BE – March 2019
PRE TEST-FEST GLOSA HELMOND
[ps2id id=’section-1′ target=”/]On June 13 and 14 the GLOSA PRE-TESTFEST took place in Helmond. This Testfest is the third Testfest in a series of 5 Testfesten that performs the international Intercor project. The Intercor project (NL, UK, FR, BE) is coordinated by Rijkswaterstaat and focuses on the roll-out of C-ITS services in Europe that are interoperable across national borders.
The PRE-TESTFEST is organized by the Province of Noord-Brabant and the municipality of Helmond in cooperation with the UK partners. During these two days the Intercor standards for C-ITS GLOSA (Green Light Optimum Speed Advice) were tested by various suppliers from home and abroad.
V-tron has created its own ZOOF variety in cooperation with the ITS corridor team to support GLOSA services. During this two-day event V-tron gave several demonstrations to give an impression to the audience present. more information?
Intercor (EN) or Smart Wayz (NL)
TALKING MAPS
Talking Maps is a trial by the cooperating province of Noord-Brabant, the Ministry of Infrastructure and Water Management and the companies V-TRON and AND and will last a maximum of two years. The organizations involved signed a cooperation agreement on Intertraffic at the RAI in Amsterdam on 20 March.
According to Ruben Kragten, representative in the cooperation from V-TRON, the agreement is a good example of a collaboration between market parties and governments. “We want to test and apply our technical solutions in traffic. And we can not do that alone. We are happy to work together with the government, “he says
ZOOF A16
Rijkswaterstaat works daily on an accessible Netherlands. We do this not only through the construction of new roads and waterways, but also through more efficient use of existing infrastructure. Innovative systems for travel information and traffic management can help us.
At present we are working – in coordination with Germany and Austria – on the introduction of a number of cooperative ITS services on a so-called ‘corridor’, the route that runs from Rotterdam, via Breda, Tilburg and Eindhoven to Venlo (A16 – A58 – A2 – A67 ): V-tron has stepped in as an HMI (Human Interface) supplier.
V-tron provides the interface towards the driver. If there are reports from the roadside (A16 – A58 – A67), this is shown to the driver in the ZOOF app and he / she can adjust her driving behavior accordingly. More information about this project can be found on the site of the ITS Corridor
FIELDTEST A58
[ps2id id=’section-2′ target=”/]Are sensor data from vehicles technically useful for traffic management or other services in the future? That is the central question during a test with the Probe Vehicle Data service, commissioned by the C-ITS Corridor project team at Rijkswaterstaat. READ MORE..
During the test – which was coordinated from the Innovation Center in Helmond – the On Board Units of passing test vehicles sent messages with information about the vehicle, such as position and speed. The messages were received by the secure ETSI G5 wifi connection.
In addition, messages were also collected from the test vehicles via the mobile 3 / 4G network. For this, the ZOOF app of the Spookfiles A58 project has been used. The first findings are positive. The logging of the messages sent by the test cars proved to be easy to read. And via a web viewer the exact locations and traveled routes of the test vehicles were shown.
ZOOF A58
[ps2id id=’section-6′ target=”/]ZOOF is an app for iPhone and Android phones that you as a road user advises about the optimum speed, about handling at entry and exit lanes and about the following distance after traffic jams.
With ZOOF you score points (ZOOFies) by following these recommendations, which you can exchange for nice rewards with the partners of ZOOF. At the moment ZOOF can be used on the A67 and A58, allowing you to drive from Tilburg to Eindhoven and Venlo with ZOOF.
ZOOF is a product that arises from a collaboration between the regional government agency BBZOB (Beter Benutten Zuid-Oost Brabant), SRE (Samenwerkingsverband Regio Eindhoven), the Province of Noord-Brabant and the business community. Together, the government and the business community are looking for a better flow on the Dutch motorways.
Within the projects Brabant InCar III and Spookfiles A58, ZOOF carries out tests for the government on the A67 and A58 that focus on improving traffic flow. You can participate in these tests! ZOOF can be downloaded from the Google Play Store and Apple AppStore.
Register via the app, start the route and score ZOOFies! More information about this project can be found on the ZOOF website.