REVEAL
[ps2id id=’section-1′ target=“/]5G-Blueprint beabsichtigt, ein technisches Architektur-, Geschäfts- und Governance-Modell für einen unterbrechungsfreien grenzüberschreitenden telebetriebenen Transport auf der Grundlage der 5G-Konnektivität zu entwerfen und zu validieren. 5G-Blueprint untersucht und definiert:
*Die Wirtschaftlichkeit von 5G-Tools im grenzüberschreitenden Verkehr und in der Logistik sowie im Personenverkehr: Berücksichtigung der Investitionskosten (Investitionsausgaben) und der Betriebskosten (Betriebsausgaben) sowohl auf der Angebotsseite (Telekommunikation) als auch auf der Nachfrageseite (Transport und Logistik) zur Transformation aktueller Geschäftspraktiken sowie neuer Wertversprechen
*Die Governance-Fragen und -Lösungen in Bezug auf Verantwortlichkeiten und Rechenschaftspflicht innerhalb der Wertschöpfungskette hängen von grenzüberschreitender Konnektivität und nahtlosen Diensten im Zusammenhang mit den niederländischen und belgischen Rechtsvorschriften (Telekommunikations-, Verkehrs- und CAM-Experimentiergesetze (Connected and Automated Mobility), Verträge, Wertschöpfungskettenmanagement) ab )
*Taktische und betriebliche (Vor-) Bedingungen, die vorhanden sein müssen, um den vollen Wert von 5G Tooled Transport & Logistics zu erzielen. Dies beinhaltet die Implementierung von Anwendungsfällen, die das Bewusstsein für Kooperationen stärken, um einen sicheren und verantwortungsvollen teleoperierten Transport zu gewährleisten
*Vorbereitung und Pilotierung von ferngesteuerten und fernüberwachten Transporten auf Straßen und Wasserstraßen, um den zunehmenden Mangel an Arbeitskräften zu verringern und Transport und Logistik durch Datenaustausch in der Lieferkette und Einsatz von KI auf ein höheres Effizienzniveau zu bringen
Erkundung der Möglichkeiten zur Erhöhung des Frachtvolumens in der Nacht, wenn reichlich physische Infrastrukturkapazitäten vorhanden sind; Die Senkung der Personalkosten würde dies kostengünstig möglich machen
Der Telebetrieb wird durch die folgenden 5G-Eigenschaften ermöglicht, wie z. B. geringe Latenz, zuverlässige Konnektivität und hohe Bandbreite
Das Ergebnis des Projekts wird der Entwurf für den operativen europaweiten Einsatz von teleoperierten Transportlösungen im Logistiksektor und darüber hinaus sein.
")
")
CONCORDA
CONCORDA trägt zur Vorbereitung europäischer Autobahnen für das automatisierte Fahren und zum Platooning von Lastkraftwagen mit hoher Dichte mit angemessenen verbundenen Diensten und Technologien bei.
CONCORDA wurde im Oktober 2017 gestartet und von der Connecting Europe Facility finanziert. Das Unternehmen hat daran gearbeitet, angemessene Dienste und Technologien für verbundene Interferenzen und Interoperabilität bereitzustellen, um die Fragmentierung und Rückwärtsinteroperabilität zwischen Cooperative-ITS-Diensten und dem C zu bekämpfen -Ladungen zur Gewährleistung harmonisierter Dienstleistungen. unter realen Verkehrssituationen.
Technologien
CONCORDA kombiniert 802.11p- und LTE-V2X-Konnektivität, ohne die vorhandenen Interferenz- und Interoperabilitätsdienste zu beeinträchtigen, um die Interoperabilität von C-ITS-Rückwärtsdiensten mit den von C-ROADS unter realen Verkehrssituationen harmonisierten Diensten sicherzustellen.
Interoperabilität und Tests
CONCORDA hat Tests an Standorten in den Niederlanden, Belgien, Frankreich, Deutschland und Spanien durchgeführt, um die Interoperabilität der Teststandorte zu verbessern. Die Interoperabilität wurde in drei Richtungen entwickelt:
3 Teststandorte in den Niederlanden:
A. Teststandort Amsterdam Metropolitan Area
B. Testort Nordbrabant
C. Helmond Metropolitan Area
Konzentriert auf:
Hybride Kommunikations- (Vor-) Implementierung und Straßennetze für automatisiertes Fahren. Anwendungsfälle. Öffentliche Rolle in Bezug auf automatisiertes Fahren und Sicherheit. Straßensysteme (RSU und Kommunikationsnetze). Integration von Kommunikation und Funktionalität in Autos (FRC).


REVEAL
Ziel von ReVeAL ist es, das Standardangebot für städtische Mobilitätsübergänge von Städten in ganz Europa um die UVAR-Bestimmungen (Urban Vehicle Access Regulations) zu erweitern. Das EU-finanzierte R & I ReVeAL-Projekt befasst sich zum ersten Mal seit dem CURACAO-Projekt (das vor zehn Jahren endete) mit diesem heißen Thema.
Die übergeordnete Mission des Projekts besteht darin, den Städten die Optimierung des städtischen Raums und die Nutzung des Verkehrsnetzes durch neue und integrierte Pakete von Richtlinien und Technologien für den Zugang zu städtischen Fahrzeugen zu ermöglichen. Solche Maßnahmen können zu weniger Emissionen, weniger Lärm und einer besseren Erreichbarkeit und Lebensqualität führen, was vor allem den Menschen in diesen Städten zugute kommt. Diese Politik kann auch nachhaltigere Verkehrsentscheidungen fördern und Städte lebenswerter, letztendlich gesünder und attraktiver für jedes Mitglied der Gesellschaft machen.
Zu diesem Zweck kombiniert ReVeAL konzeptionelle Arbeit und Fallstudienforschung mit praktischer UVAR-Implementierung in sechs Pilotstädten sowie systematischer Interaktion mit Stakeholdern durch professionelle Kommunikationsaktivitäten.
Das Projekt startete im Juni 2019 und läuft drei Jahre.
VISTA
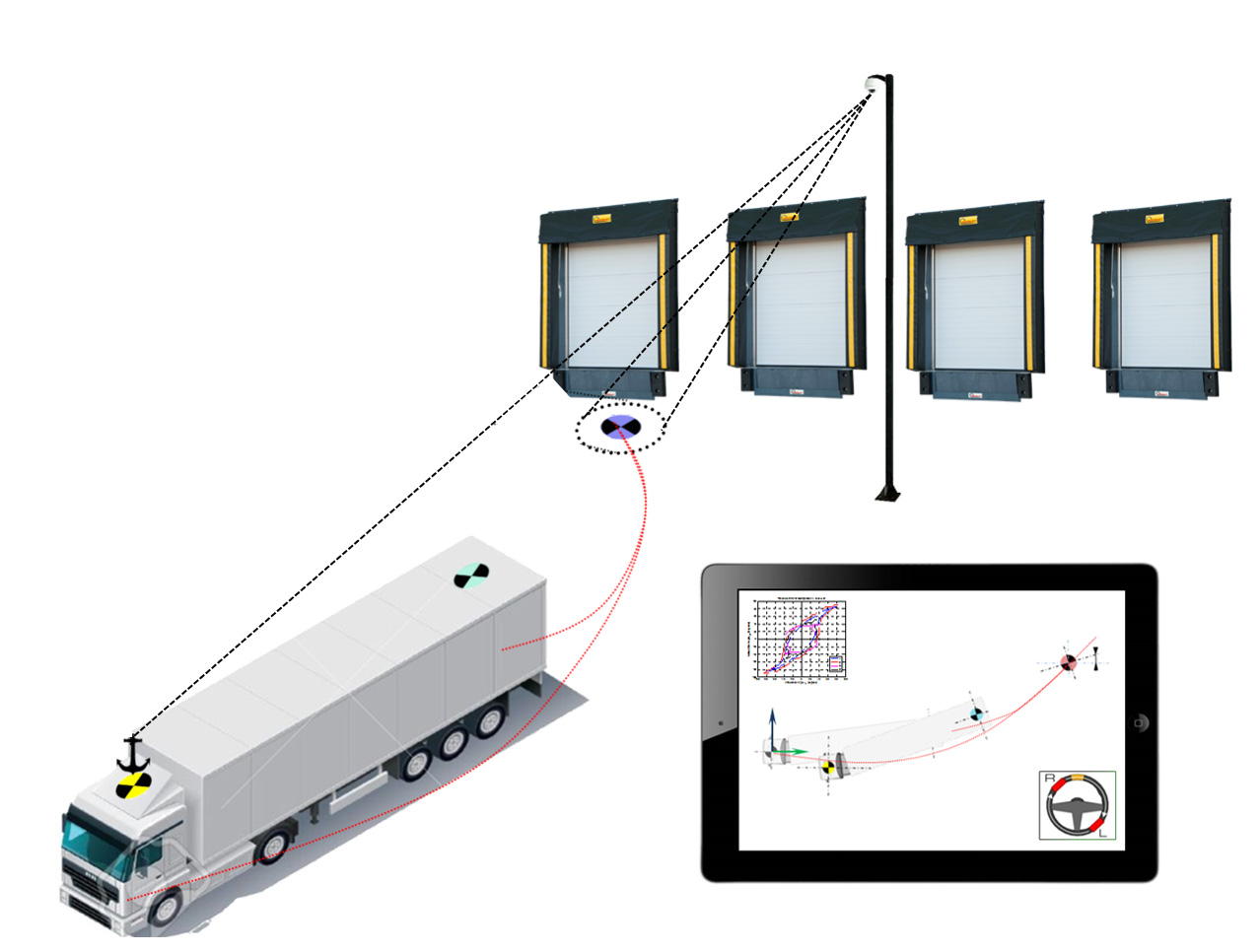
Das Rückwärtsmanövrieren von LKW-Anhänger-Kombinationen kann eine Herausforderung sein, insbesondere wenn es sich um ein Fahrzeug mit mehreren Gelenken handelt. Logistikunternehmen sind erheblichen Schäden ausgesetzt, die durch Fahrzeugkombinationen beim „Andocken“ verursacht werden: Das Fahrzeug wird rückwärts gegen eine Docktür geparkt, um Waren zu laden und zu entladen.
VISTA steht für VIsion Supported Truck Docking Assistant. Ziel von VISTA ist es, Lkw-Fahrer beim Manövrieren von Fahrzeugkombinationen zum Andocken von Türen in Logistikbereichen zu unterstützen. Das Herzstück der VISTA-Lösung ist eine genaue optische Lokalisierung von LKW und Anhängern. Hierzu werden Kameras im Distributionszentrum montiert. Basierend auf dieser Lokalisierung wird ein optimaler, erreichbarer Pfad berechnet. Der Fahrer erhält dann Informationen über eine intuitive Benutzeroberfläche, um diesem Pfad ordnungsgemäß zu folgen. Dem Fahrer wird beim Betreten des Distributionszentrums die Benutzeroberfläche angezeigt.
I-CAVE
Dieses Forschungsprogramm adressiert die aktuellen Transportherausforderungen in Bezug auf Transit und Sicherheit mit einem integrierten Ansatz für automatisiertes und kooperatives Fahren.
In i-CAVE gibt es einen kooperativen automatisierten Dual-Mode-Transport
(C-DMAT) System geprüft und ausgelegt bestehend aus
Dual-Mode-Fahrzeuge, die für maximale Flexibilität automatisch und manuell gesteuert werden können. Das Programm integriert technologische Streckenkarten für automatisiertes und kooperatives Fahren und beschleunigt so die Entwicklung neuer Verkehrssysteme, die den aktuellen und zukünftigen Mobilitätsanforderungen entsprechen. Neben diesen aktivierenden Technologien stehen Fehlertoleranz und Ausfallsicherheit, drahtlose Kommunikation, menschliche Faktoren und andere Faktoren im Vordergrund, die den Übergang von der Kontrolle zwischen manuellem und automatisiertem Fahren und die Reaktion anderer Verkehrsteilnehmer betreffen.
i-CAVE adressiert die wichtigsten Herausforderungen des automatisierten Fahrens, d. h. das Erreichen einer hohen Sicherheit und Zuverlässigkeit durch ein striktes technologisches Design in Kombination mit einer nahtlosen Integration zwischen automatisiertem und manuellem Fahren, um maximale Flexibilität und Benutzerakzeptanz zu erzielen. Ein lebendes Labor wird für die Integration und Bewertung genauer visueller Kartierungs- und Lokalisierungstechniken, verteilter kooperativer Fahrzeugsteuerungsalgorithmen und Flottenmanagementmethoden genutzt.


INTERCOR-PROJEKT - BLICK HINTER DEN SZENEN
Test Fest 1: Dordrecht – NL – Juli 2017
TestFest 2: Reims – FR – April 2018
TestFest 3: Kent – Großbritannien – Oktober 2018
TestFest 4: Antwerpen – BE – März 2019
PRE TEST-FEST GLOSA HELMOND
V-tron hat in Kooperation mit dem ITS-Korridor-Team eine eigene ZOOF-Variante zur Unterstützung der GLOSA-Dienstleistungen geschaffen. Während dieser zweitägigen Veranstaltung gab V-tron mehrere Demonstrationen, um dem anwesenden Publikum einen Eindruck zu vermitteln. mehr Informationen?
Intercor (EN) oder Smart Wayz (NL)
TALKING MAPS
Talking Maps ist eine Studie der kooperierenden Provinz Noord-Brabant, des Ministeriums für Infrastruktur und Wasserwirtschaft und der Unternehmen V-TRON und AND und wird maximal zwei Jahre dauern. Die beteiligten Organisationen unterzeichneten am 20. März auf der RAI in Amsterdam eine Kooperationsvereinbarung über Intertraffic.
Laut Ruben Kragten, Vertreter in der Kooperation von V-TRON, ist das Abkommen ein gutes Beispiel für eine Zusammenarbeit zwischen Marktparteien und Regierungen. „Wir wollen unsere technischen Lösungen im Verkehr testen und anwenden. Und das können wir nicht alleine machen. Wir freuen uns, mit der Regierung zusammenzuarbeiten „, sagt er.